The automotive industry is an anomaly. The industry has annual worldwide sales of over $1.5 trillion. It’s dominated by a dozen powerful conglomerates each with distinct consumer brands. And, so far, it’s almost completely avoided the digital age and the effects this new age has on business models. All three of these unique traits will change over the next decade.
The rise of self-driving cars will remake the automotive industry, devastating most companies, and enriching a small few. Fortunately, there are many lessons from other industries that we can apply to understand what will likely happen in this new transportation industry.
Before diving into that, we first need to understand why the future of transportation is self-driving car fleets. I won’t spend much time on the topic as it’s been talked about extensively elsewhere, but it’s important to understand so we can build upon it later.
Self-driving car fleets
Currently, the average personal car utilization rate is ~5%. Under a well-optimized system, fleet self-driving vehicles could have a utilization rate of 50%+. This higher utilization means a lower cost to the end consumer.
Deloitte estimates that a personally owned vehicle costs ~$0.97 per mile and a self-driving car in a fleet will cost ~$0.30 per mile. Assuming a person drives 10,000 miles per year, that’s an annual savings of $6,700. These savings alone will likely be enough to convince large amounts of the population to switch to a Transportation as a Service (TaaS) system. Additionally, governments will likely see the safety and environmental benefits of self-driving fleets and in turn, disincentivize personal car ownership to help convince more people to switch.
Transportation as a Service
To understand how this new model will change the automotive industry, we can look at the personal computer (PC) and mobile industries. These industries have experienced significant changes over the last 30 years, but there has been one constant pattern throughout that time: the Smiling Curve.
The Smiling Curve history
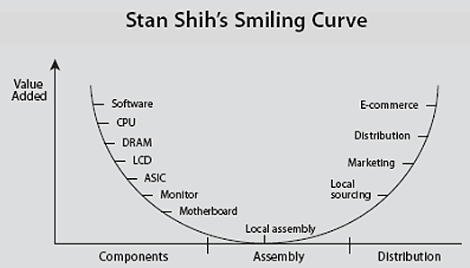
The Smiling Curve was created by Acer (a computer OEM firm) founder Stan Shih in 1992. The theory illustrates that the ends of the computer value chain command a higher value add. For instance, both Windows, who creates the software, and Intel, who owns the R&D for the main computer microchips, are able to capture most of the profit in the PC industry. The rest of the industry players are forced to compete for the leftovers.
On the distribution side, the ability to capture more of the value add has only increased since Shih developed the concept. The rise of the internet changed distribution by reducing the marginal cost of delivering digital services to basically zero. Now, Microsoft can deliver Windows to customers without any incremental delivery cost.
Apple took a unique strategic approach in both the PC and mobile industry, but one that still follows the Smiling Curve concept. Apple carved out the high value add activities, like software, design, and branding then outsourced the low value add activities, like manufacturing. However, in order for Apple’s integrated model to be viable, Apple needs to have a massive scale in order to recoup the significant fixed cost of software development and hardware design.
Meanwhile, other firms in both the PC and mobile industries had to follow behind modular solutions — Windows (for PCs) and Android (for mobile). Although these modular solutions have very different ways of monetizing, Microsoft and Google both fill this important role, which allows other firms to compete. At the same time though, Microsoft and Google filling this role permanently constrains these firms to only the low value add areas.
Applying the Smiling Curve to the auto industry
Currently, a dozen large conglomerates control most of the auto industry. And each conglomerate has adopted the same operational strategy — create a portfolio of different car brands (e.g., Jeep, Fiat, Chrysler), each with strong personas and cultural affiliations, and own the whole process from car concept creation to manufacturing. Thereby each conglomerate owns its own respective Smiling Curve.

Since we can assume the future of transportation is fleet, we can start to make more assumptions on how the industry will change. Self-driving fleets will introduce three new important areas.
- Sensory hardware — self-driving technology only works when the car has a precise 3-D map of its surrounding. To create this 3-D map, companies need to have good sensory technology. As such, some companies are now rushing to create their own sensory technology. Waymo has spent years and millions of dollars to create a proprietary system. General Motors acquired Strobe. Ford acquired Princeton Lightware. Meanwhile, other companies are choosing to partner — Toyota is partnering with Luminar and Velodyne is working with dozens of self-driving car programs.
- Self-driving car software — this is the most challenging part. Building good software takes more than money. It takes time, data, and a culture built around the software development process.
- Fleet networks — need to be deeply tied to the self-driving software. The TaaS model is centered around geographic hubs where cars are managed from central locations and then distributed across the city based on demand.
All three of these new areas are in the high value add part of the Smiling Curve. As such, the firm(s) providing these new products and services will capture the vast majority of the profit in the new ecosystem. That’s why there are 46 companies competing for a coveted spot in the self-driving car market.
In this new self-driving car fleet model, I believe two things are needed to succeed, each of which I’ll elaborate on in the two sections below. First, a firm’s self-driving car software needs to have massive scale. And second, the integration between the software and fleet operations needs to very strong.
The network effects of self-driving car software
Self-driving car software is unique. Most software is built using the Pareto Principle, or more commonly known as the 80/20 rule, where 80% of the benefit will come from 20% of the work. This is the right strategy when the software only needs to handle a handful of use cases. Self-driving car software is different though. The software needs to be able to handle 99.9999% of the possible use cases for a given geographical environment.
It’s that last 0.1% edge case that makes the software worth billions of dollars.
Thus, self-driving car software needs lots and lots of outliers to learn from and actually be useful.
Let’s take the example of an outlier scenario that occurs once every 10,000 miles. And let’s say that in order to learn how to drive in this outlier scenario, the software needs 100 different outlier scenarios data sets. Therefore, the software needs 1 million miles just to understand that one outlier scenario.
One way to find those outlier scenarios is to create them yourself, either through computer or closed road simulations. These simulations have a lot of benefits and are a great way to quickly test out how an updated software program will perform. However, simulated situations can never fully capture all the scenarios that will occur on the open road, whether it be a lidar sensor obstructed with bird droppings or a woman in an electric wheelchair chasing a duck in the middle of the road. The only way to understand all the outlier scenarios is to experience them first hand.
Another unique nuance of self-driving car software is that the whole process of learning these outlier scenarios will need to be repeated in every new geography. Each geography has unique terrain, weather, road layouts, and road norms. That’s why for instance people who believe self-driving car software should first start in easy to navigate areas like retirement communities are missing the point.
Firms that are building a self-driving car software that maxes out at 25 mph and only works in a constrained environment are building an entirely different product than one that can operate on public roads. Operating in an environment without outliers doesn’t improve the software, it confines the self-driving car software to the simplest of use cases.
Given this structural dependency on outliers, self-driving car software will have powerful network effects. The more people that ride using a specific self-driving software, the more outliers experienced, the better the passenger experience, the more people want to ride with that specific self-driving software. Some of this learning will be transferable across geographies, but a lot will be unique. Therefore, this network effect will need to occur in every new geographical area. Having 99.9999% effectiveness in Phoenix, Arizona doesn’t mean that the level of effectiveness will transfer to other cities.
We’ve seen these powerful network effects in software before and there are three different business models that work. First is the Apple approach, which used first-mover advantage and captured a large enough portion of the market to start the network effects. Second is the Android and Windows approach of modularizing the software so other firms can leverage the software in their own products. This way Android and Windows can use the sum total of all their users to push the network effects far enough along that no other firms can compete. The last approach is open source which allows the whole community to have the ability to access and improve the software. Thereby if the right incentive structure is in place, as the community scales so does the software.
Self-driving car software and fleet networks are unique again though. The Android and Windows approach only works because the connection between the software and hardware is static and passive. The connection between the self-driving car software and fleet operations will be dynamic and active. I’ll discuss this issue further in the section below but this dynamic nature will likely eliminate the Windows and Android approach as a viable self-driving car fleet business structure.
In order to work, the open source approach needs the proper incentive structure — which is very difficult to create. If a firm believes they can leverage the open source code and reach the network effects themselves, they’ll have no incentive to contribute its own learning to the source code.
In my opinion, this open source structure, or more likely a joint-venture, is automakers best hope of competing. Leveraging their combined power to remove this high-value add component would level the playing field for everyone. Yet, automakers don’t appear to show any desires to share learnings. And by the time they come around to the idea, they’ll likely already be out of the running.
Integration between software & fleet
Fleet operations will be complex. Unlike Uber today, fleets will have control over how many cars are in certain geographical areas, where cars should be placed down to the exact street level, and where cars should be driving to avoid high-risk areas. This complex operation will constantly be changing too, weather conditions, traffic, and user demand will always be in flux.
For instance, imagine its a rainy day in San Francisco at 3:00 pm on a Tuesday in February. Most K-12 students are finishing classes for the day. The rain has increased the chance of an accident on a few steep roads that collect rainwater run-off. Traffic is starting to increase and will continue to until the rush hour peak each weekday at 5:50 pm.
To manage this whole process, the system will need lots of feedback data. Self-driving cars will send automatic second by second status reports. At the end of each ride, customer feedback will be collected. The fleet operations software will analyze all this incoming data to run different scenarios and choose the optimal path forward.
In very unique risky cases (<0.01%), the self-driving car software may even need to have a human in the loop. Where a human quickly reviews a flagged situation and helps the software decide on a course of action. The self-driving car software system will need to analyze these status reports and make improvements to the model.
Once the self-driving car software team believes they have a more optimal model (which they’ve tested in simulations), the team will perform A/B tests before rolling it out to the entire fleet. During these tests, the fleet operators will need to randomize which cars receive the updated software to ensure the test’s validity.
As you can see, the integration between the self-driving car software and fleet operations will be strong. This entanglement points to a high probability of the self-driving car software and fleet operations being owned by the same firm. In other words, the modularized Android and Windows business model won’t work. The more vertical integration approach of Apple will likely be the best model. Integrating the self-driving car software and fleet networks will lead to a better user experience. The firm(s) that operate using this integrated approach though will need to have large sums of capital to move quickly to scale.
The new transportation business model
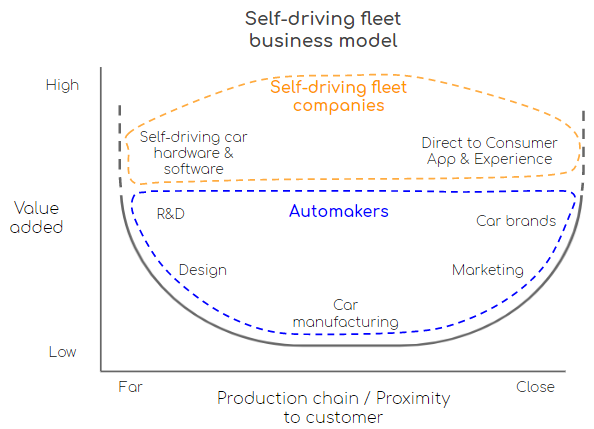
The first company or companies to reach the size necessary to start the network effect cycle will dominate the industry. As seen in the Smiling Curve above, these companies will be providing almost all the value add in the industry and, as such, will reap all the rewards. The actual cars themselves will become commoditized and undifferentiated. Similar to other transportation industries where the customer is not driving the vehicle (e.g., airplanes and trains) customers will only buy different levels of fares — economy, premium, business, etc.
Think about the Uber model today. Riders only care about how smooth the ride is, how expensive the ride is and how long it takes to get to the destination. They don’t care about how the engine feels or the quality of the stick shift. There are no personal brand affiliations. Riders don’t get more excited about a Toyota compared to a Ford. Most of the time riders don’t even notice the brand of the car. Fleet operators will become automakers’ direct customers and have the ability to assert price control.
These changes all point to the decimation of the incumbent automakers.
The large automaker conglomerates will be whittled down to only a small handful that are able to operate with the lower profit margins. Automakers only hope of escaping this future is to move up the Smiling Curve and own the software and fleet networks. However, I wouldn’t hold out hope — — my money’s on the companies that actually know how to build software.
